Smartrunner - detekování kompletnosti a polohy




Popis
 Oskenování daného místa a reálná data toho, "co senzor vidí"
Oskenování daného místa a reálná data toho, "co senzor vidí"
Dnešním úkolem byla detekce kompletnosti, správnosti, orientace a utažení zámku pásů na sedačkách u automobilů. Obsluha uchytí zámek a podložky na připravený šroub a robotický šroubovák provede utažení patřičným momentem. Před utažením je nezbytné, aby do sebe vše zapadlo. Občas se stane, že zámek pásu se před dotažením pootočí a šroubovák pak utahuje matici pod kterou je špatně vložen zámek. Celé to pak do sebe nezapadne. Je tedy nezbytné učinit taková opatření, aby tato část byla splněna 100%.
Zadání
- Detekce správného vsazení komponentů (zámek,podložka,šroub)
- Detekce správné polohy, tak aby zámek zapadl do západky
- Vzdálenost pro detekci 30cm
- Upevnění na robotickém rameni automatického šroubováku (vibrace)
- Napájení 24VDC s logickým výstupem 1,0
- Spouštění na základě informace z robota
- Funkčnost při různých osvětleních - denní provoz, noční provoz
- Rozlišování i zrcadlově otočených dílů (pravá a leva strana)
Na tuto aplikaci se náramně hodil senzor, který jsme nedávno testovali - psali jsme o tom v článku "SmartRunner - 2D senzor pro přesnou detekci profilů,kvality dílů,třídění zboží,správnosti založení"
Řešení
 Data převedená do křivek a parametrizace senzoru
Data převedená do křivek a parametrizace senzoru
Umístili jsme senzor na požadovanou vzdálenost tak, aby nepřekážel ani obsluze, ani robotické ruce se šroubovákem. Senzor je umístěn v pozici, aby dokázal vyhodnocovat předmět i při případném utahování šroubu - nebylo to předmětem zadání, ale kdyby bylo potřeba, lze použít i v tomto režimu. Senzor se bez větších problémů naučil černý povrch a jeho profil na danou vzdálenost. Pro kontrolu jsme si stáhli reálný obraz toho, "co senzor vidí". Tyto data jsou následně zpracovány a výsledkem je převod vzdálenosti a šířky do křivek, jak ukazuje další obrázek. Se zákazníkem jsme se domluvili na tolerancích, která dané linka vyžaduje, abychom zajistili bezproblémový chod. Tolerance se dají nastavit jak pro osu X, tak pro osu Z. Rozlišovací schopnost senzoru byla zvolena opět na základě předpokladů a to 0,3mm a odpovídá zhruba půl otáčce utažení matice versus chyba měření. Větší rozlišovací schopnost není ani potřeba. Senzor by ani nemohl na základě optických dat vyhodnotit správné dotažení, to ani nebylo předmětem této úlohy. Zbývá poslední část - trigování, spouštění senzoru. Senzor má automatický trigovací režim, kdy nepřetržitě detekuje daný předmět a provede zhruba 1-5 skenování za sekundu. Možností je i použití manuálního, čili externího senzoru impulzem. Ta se nakonec ukázala jako nejlepší, z důvodu přítomného PLC pro robotizovanou ruku šroubováku. Senzor se spouští na základě informace o dotažení šroubu napřímo z robota.
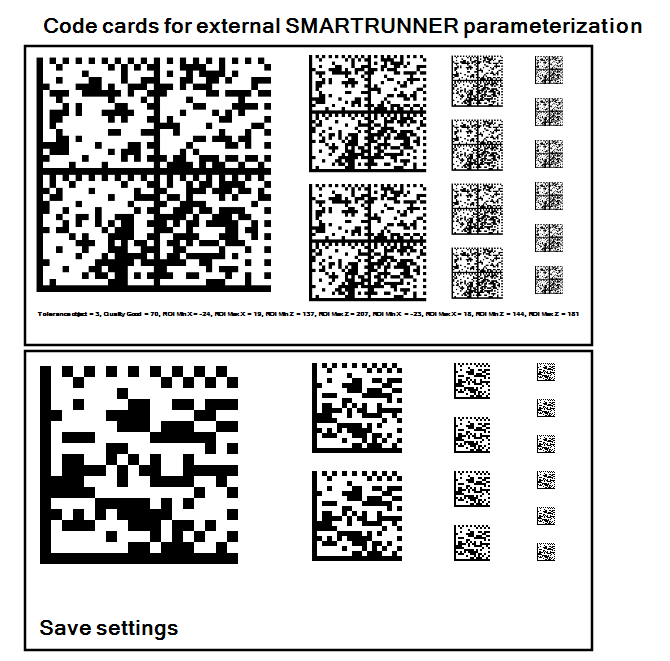 Datamatrix parametrizační kódy
Datamatrix parametrizační kódy
Bonus
Obrovskou výhodou je možnost parametrizovat senzor bez používání PC. Údržba, která bude provádět pravidelný servis, popřípadě bude nutné senzor vyměnit, stačí mít u sebe vytištěné Datamatrix kódy, ve kterých jsou obsažená data, která jsme nastavili při prvotní instalaci.
Pokud Vás článek zaujal, neváhejte nás kontaktovat pro další informace, či vyzkoušení senzoru na emailové adrese: info@prumyslovesenzory.cz
Děkujeme za pozornost.
Nejčtenější články


IO-link master - hardware (Ethernet/Profinet rozhraní, 8IN/OUT, 24VDC/16A), část první
29. květen 2019

SmartRunner - 2D senzor pro přesnou detekci profilů,kvality dílů,třídění zboží,správnosti založení
04. leden 2018